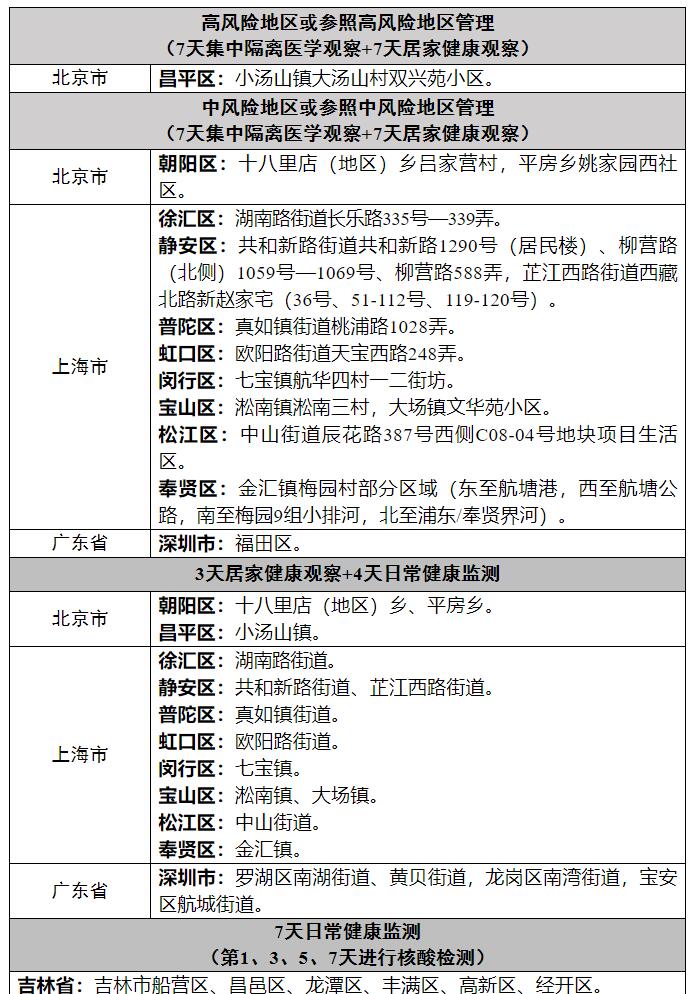
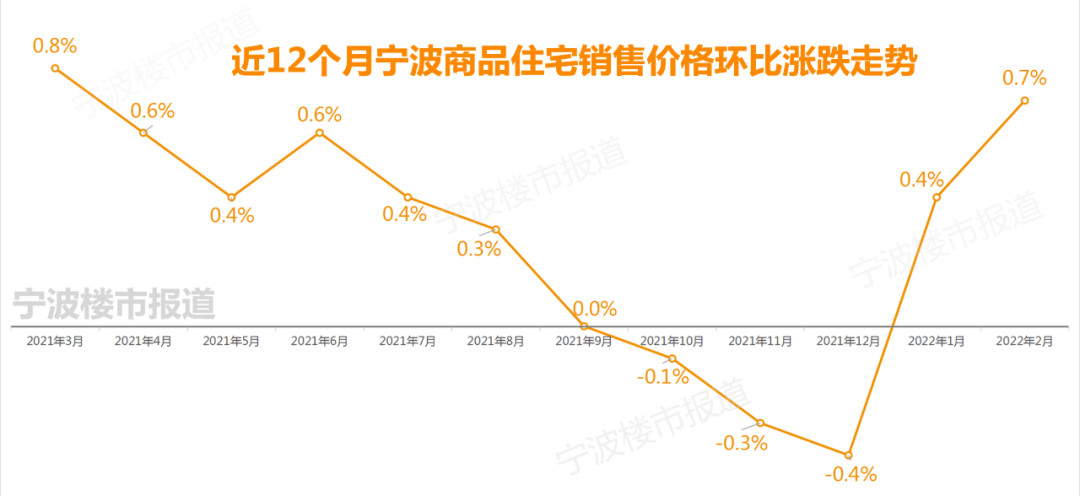
 (資料圖片僅供參考)
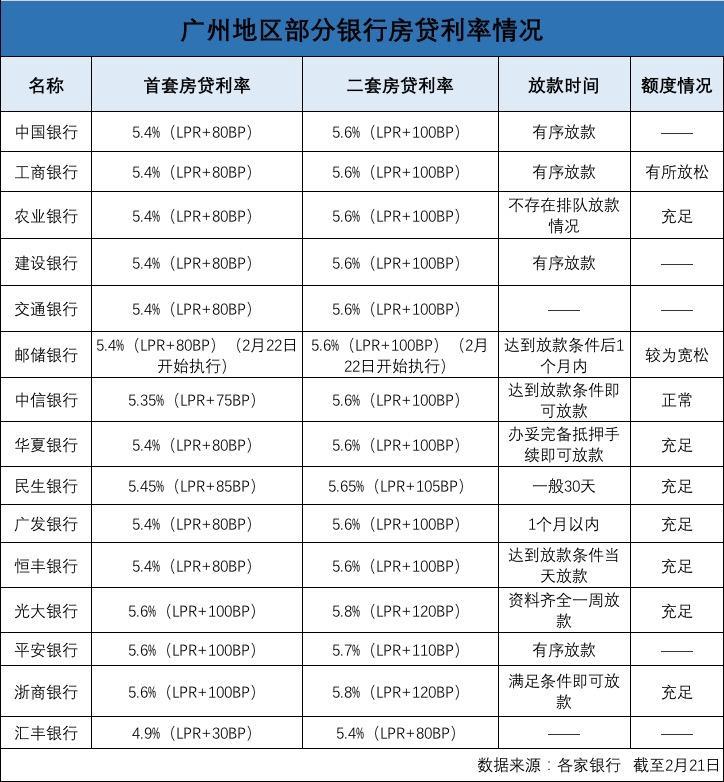
(資料圖片僅供參考)
? Read original article? Download original article (pdf)
計(jì)算機(jī)化的聲音宣布每個(gè)動(dòng)作,例如“將叉子移到食物上”、“收回刀子”等等。然后該系統(tǒng)通過兩只機(jī)械手臂根據(jù)癱瘓男子的微妙動(dòng)作,執(zhí)行“選擇切割位置”等操作,然后將切下來(lái)的蛋糕送到該男子的口中。
在不到 90 秒的時(shí)間里,一個(gè)上半身活動(dòng)能力非常有限、大約 30 年無(wú)法使用手指的人,用他的大腦和一些智能機(jī)器人手臂自己進(jìn)食了甜點(diǎn)。
該團(tuán)隊(duì)來(lái)自馬里蘭州勞雷爾的約翰霍普金斯應(yīng)用物理實(shí)驗(yàn)室 (APL) 和約翰霍普金斯醫(yī)學(xué)院物理醫(yī)學(xué)與康復(fù)系 (PMR) ,相關(guān)論文發(fā)表在《Frontiers in Neurorobotics》上。
該研究建立在神經(jīng)科學(xué)、機(jī)器人技術(shù)和軟件方面超過 15 年的研究基礎(chǔ)上,由 APL 與 PMR 部合作領(lǐng)導(dǎo),作為革命性假肢計(jì)劃的一部分,該計(jì)劃最初由美國(guó)國(guó)防高級(jí)研究計(jì)劃局贊助。新論文概述了一種共享控制的創(chuàng)新模型,該模型使人類能夠以最少的精神輸入操縱一對(duì)機(jī)器人假肢。
APL 研發(fā)部高級(jí)項(xiàng)目經(jīng)理 Francesco Tenore 教授表示:“這種共享控制方法旨在利用腦機(jī)接口和機(jī)器人系統(tǒng)的內(nèi)在能力,創(chuàng)造一個(gè)‘兩全其美’的環(huán)境,用戶可以在其中個(gè)性化智能假肢的行為。雖然我們的結(jié)果是初步的,但我們很高興能夠讓能力有限的用戶真正感受到對(duì)日益智能的輔助機(jī)器的控制”。
該論文的第一作者大衛(wèi)·漢德曼(David Handelman)博士表示,該論文中展示的機(jī)器人技術(shù)最重要的進(jìn)步之一是將機(jī)器人自主性與有限的人工輸入相結(jié)合,機(jī)器完成大部分工作,同時(shí)使用戶能夠根據(jù)自己的喜好定制機(jī)器人行為。
-

天天快訊:最新!許昌市人民代表大會(huì)常務(wù)委員會(huì)任免名單
頭條 22-06-28
-

最資訊丨剛剛,河南終止防汛四級(jí)應(yīng)急響應(yīng)
頭條 22-06-28
-

-

-

全球觀察:華北水利水電、大連理工戰(zhàn)略簽約鄭州昀家實(shí)業(yè)
頭條 22-06-28
-
環(huán)球熱推薦:隔夜歐美·6月28日
頭條 22-06-28
-

當(dāng)前快訊:立方風(fēng)控鳥·早報(bào)(6月28日)
頭條 22-06-28
-

-

-

-

全球微速訊:立方風(fēng)控鳥·晚報(bào)(6月27日)
頭條 22-06-28
-

最資訊丨@在鄭人員,準(zhǔn)備好!2000萬(wàn)元文旅消費(fèi)券來(lái)了
頭條 22-06-28
-

每日快播:@全國(guó)中小微企業(yè),這些政策支持你→
頭條 22-06-27
-

-

天天熱推薦:平頂山市委書記張雷明帶隊(duì)赴北京開展招商考察活動(dòng)
頭條 22-06-27
-

今日看點(diǎn):水利部研究推進(jìn)陸地水資源衛(wèi)星工程立項(xiàng)工作
頭條 22-06-27
-

每日速訊:湖北省自然資源廳副廳長(zhǎng)鄒清平接受審查調(diào)查
頭條 22-06-27
-

世界訊息:武漢:購(gòu)買符合條件的新能源汽車 給予3000元購(gòu)車大禮包
頭條 22-06-27
-

-

全球速讀:立方風(fēng)控鳥·早報(bào)(6月27日)
頭條 22-06-27
-

全球滾動(dòng):周口市關(guān)于推遲學(xué)生上學(xué)、人員上班的緊急通知
頭條 22-06-27
-

-
-

【全球獨(dú)家】河南高溫津貼上調(diào) 6月起連發(fā)4個(gè)月
頭條 22-06-27
-
環(huán)球熱訊:年抽采能力超20億立方米!山西建成全國(guó)最大煤層氣田
頭條 22-06-27
-

【環(huán)球速看料】猛獅退、金剛退兩只股票將于6月27日被摘牌
頭條 22-06-27
-

-

-

要聞速遞:金融助力三農(nóng)!河南省線上常態(tài)化銀企對(duì)接邀你明天見
頭條 22-06-27
-
-

-
-

全球速訊:重磅!洛陽(yáng)獲世界客屬第33屆懇親大會(huì)主辦權(quán)
頭條 22-06-26
-

-
今日最新!樓陽(yáng)生召開河南省防汛視頻調(diào)度會(huì)
頭條 22-06-26
-
-

-

-

環(huán)球簡(jiǎn)訊:共話“豫”制菜新機(jī)遇,餐飲大咖如何抉擇?
頭條 22-06-26
-
-

-

-

消息!原陽(yáng)縣委書記劉兵:舉全縣之力跑贏預(yù)制菜新賽道
頭條 22-06-25
-

全球速訊:隔夜歐美·6月25日
頭條 22-06-25
-

焦點(diǎn)報(bào)道:立方風(fēng)控鳥·早報(bào)(6月25日)
頭條 22-06-25
-

世界今日訊!河南省耕地面積目前穩(wěn)定在1.1億畝以上,居全國(guó)第3位
頭條 22-06-25
-

焦點(diǎn)!6月26日到27日,河南省將迎來(lái)一次暴雨天氣
頭條 22-06-25
-
-

-
世界訊息:猛獅退:深交所維持對(duì)公司股票終止上市決定
頭條 22-06-25
-

-
快訊:今晚的快樂是預(yù)制菜給的!原陽(yáng)預(yù)制菜美食嘉年華開吃
頭條 22-06-25
-

-

-









































































































- 快看點(diǎn)丨新機(jī)器人系統(tǒng)讓癱瘓男子“拿起”刀2022-06-29
- 天天熱文:BepiColombo飛越水星任務(wù)捕捉到2022-06-29
- 今日最新!韋伯太空望遠(yuǎn)鏡的主要儀器之一已2022-06-29
- 【新視野】NASA發(fā)射一個(gè)小型航天器以測(cè)試?yán)@2022-06-29
- 復(fù)興集團(tuán)郭廣昌:把健康的幸福和溫暖跨越國(guó)2022-06-28
- 有染色體異常的問題,可以做馬來(lái)西亞三代孕2022-06-28
- 入境馬來(lái)西亞做孕育嬰兒,你都得經(jīng)歷什么步2022-06-28
- 靈動(dòng)愜意,科萊威CLEVER 311km元?dú)忄`0?/a>2022-06-28
- 榕樹貸款:打造AI營(yíng)銷利器 提升金融機(jī)構(gòu)運(yùn)2022-06-28
- 無(wú)線充電是什么?無(wú)線充電原理有哪些?無(wú)線2022-06-28
- A.O.史密斯新一代零冷水燃?xì)鉄崴鳎和黄苿?chuàng)2022-06-28
- 怎么刪除映射網(wǎng)絡(luò)驅(qū)動(dòng)器菜單?怎么將文件映2022-06-28
- 微信不顯示該聊天是什么意思?微信不顯示該2022-06-28
- linux解壓rar文件的詳細(xì)步驟 Linux zip命2022-06-28
- excel函數(shù)公式加減乘除法大全 excel最常用2022-06-28
- 手機(jī)第一次使用如何正確充電? 手機(jī)電量剩2022-06-28
- 桌面圖標(biāo)不顯示圖案變成白色圖標(biāo)怎么辦?桌2022-06-28
- MLC是什么?固態(tài)硬盤顆粒MLC和TLC有什么區(qū)別?2022-06-28
- 寬帶撥號(hào)提示678是啥意思?寬帶連接錯(cuò)誤6782022-06-28
- 常見的視頻文件格式有哪些?10種常見的視頻2022-06-28
- 立于后疫情時(shí)代潮頭 碧然德以健康飲水助力2022-06-28
- 股票破發(fā)風(fēng)險(xiǎn)是什么意思?新股破發(fā)意味著什2022-06-28
- 保證金存款是什么?保證金存款有幾種?保證2022-06-28
- 什么是價(jià)值評(píng)估?企業(yè)價(jià)值評(píng)估的意義是什么2022-06-28
- MOON品牌頭盔,致力于運(yùn)動(dòng)頭盔的安全智造2022-06-28
- 流動(dòng)資金周轉(zhuǎn)天數(shù)怎么計(jì)算?流動(dòng)資產(chǎn)周轉(zhuǎn)次2022-06-28
- 就是它了,馬上訂車!被老師傅相中的歐航優(yōu)享2022-06-28
- 套利交易是什么意思?套利交易的特點(diǎn) 期貨2022-06-28
- 什么是歐姆龍環(huán)?歐姆龍環(huán)有什么作用?2022-06-28
- 夏天空調(diào)房用博沃納加濕器,絕了!2022-06-28
精彩推薦


閱讀排行
- 天天資訊:6月27日河南無(wú)新增本土確診病例、無(wú)癥狀感染者
- 全球微頭條丨中國(guó)科學(xué)院大學(xué)今年在豫計(jì)劃招收36名本科生,理科全省前650名比較有把握
- 當(dāng)前速訊:如何防控青少年脊柱側(cè)彎
- 重磅!河南省深化普通高等學(xué)校考試招生綜合改革實(shí)施方案出臺(tái)
- 速看!河南省高考綜合改革政策解讀50問
- 旱澇形勢(shì)轉(zhuǎn)換!河南省7月上旬前將轉(zhuǎn)為多雨期
- 適應(yīng)“新高考”河南普通高中將實(shí)行“選課走班教學(xué)” 具體將會(huì)如何進(jìn)行?
- 河南省新高考在考試和錄取方面主要有那些變化?
- 速讀:@在鄭人員,準(zhǔn)備好!2000萬(wàn)元文旅消費(fèi)券來(lái)了!
- 全球百事通!河南首屆職業(yè)技能大賽鉗工項(xiàng)目大比拼,輸贏只在毫厘間










